PSoC Capsense
参考文档:
- AN64846_Getting_Started_with_CapSense-ApplicationNotes-v26_00
- AN85951_PSoC_4_and_PSoC_6_MCU_CapSense_Design_Guide-ApplicationNotes
电容感应方法
自电容
自电容使用一个引脚,并测量该引脚与地之间的电容。原理:驱动与传感器相连的引脚上的电流并测量电压。若将手指放在传感器上,则测得的电容会增加。适合用于单点触摸传感器,如按键和滑条。
在CapSense自电容系统中,由控制器测量的传感器电容称为Cs。当无触摸时,CS等于系统寄生电容Cp。Cp与传感器垫块周围的电场有关。当手指碰触传感器表面时,手指和传感器垫片会通过覆盖层形成一个简单的平行板电容,该电容称为手指电容,即Cf。Cf是分部电容的简化形式,包括人体和返回路径对电路板接地层的效应。其公式:
$$
Cf = (ε0 * εr A) / D
$$
ε0 = 空气介电常数
εr = 覆盖层的介电常数
A = 手指与传感器垫片覆盖层的接触面积
D = 覆盖层的厚度
当手指触摸时,Cs等于Cp和Cf的总和,即 Cs = Cp + Cf
互电容
互电容感应测量两个电极间的电容,其中一个电极称为发送电极TX,另一个称为接收电极RX。如下图示:
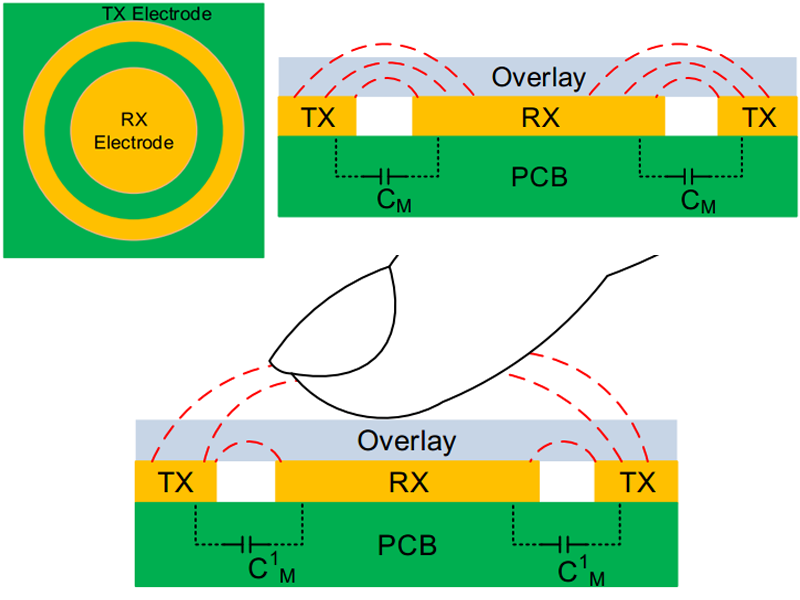
互电容适用于多点触摸系统,如触摸屏和触摸板。
PCB Design
Cp的主要组成成分是走线和电容,应尽量减少走线长度和宽度,以降低Cp。降低走线长度会增加抗噪能力,此外,通过使用屏蔽信号驱动网格,也可以降低Cp值。以下情况会增加Cp:
- 传感器垫片大小增加
- 走线长度和宽度增加
- 传感器垫片和接地网格之间的间隙减少
如果由于较长的走线或接地层所引起的传感器Cp的值非常大,您可以使用互电容感应的方法,以便在Cp值较高的情况下仍不降低灵敏度。使用互电容感应方法时,CapSense传感器的灵敏度独立于传感器Cp。
自电容按键设计
推荐为CapSense按键使用圆型传感器垫片。也可以使用圆角矩形垫片,应避免尖角(小于90°叫)垫片。
按键直径范围应介于5mm到15mm之间,其中10mm适用于大多数应用。对于较厚的覆盖层,使用较大的按键直径。
传感器垫片和地网格之间的间隙宽度应等于覆盖层的厚度,其范围为0.5mm到2mm之间。例如覆盖层的厚度为1mm,推荐使用1mm宽的间隙。但对于3mm厚的覆盖层,则只应使用2mm宽的间隙。
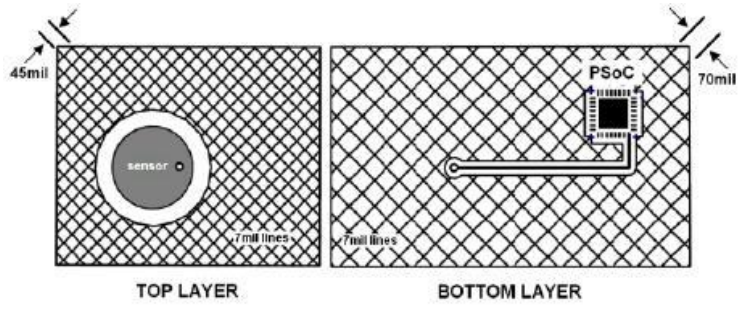
对于双层PCB,
- 将传感器放置在PCB的顶层上。
- 将组件和传感器走线布置在PCB的底层上。
推荐在传感器周围以及传感器下方的PCB板底层上使用网格接地层,规则:在顶层信号线宽度为7mil,它们的间距为45mil,在底层上该间距为70mil。
对于四层PCB:
- 将传感器放置在PCB的顶层上。
- 在第二层上路由传感器走线。
- 放置一个填充网格(走线宽度为7mil,网格宽度为70mil),并使其连接到第三层的接地层。
- 在底层上放置组件,未使用的区域使用铜网格填充(走线宽度为7mil,网格宽度为70mil),并使其接地。
还要注意:
- 尽量缩短从CapSense控制器引脚到传感器导电片之间走线的长度,以优化信号强度。
- 在离控制器引脚10mm范围内安装串联电阻,以降低射频干扰并提供ESD保护(560R)
- 将控制器和其他组件安装在PCB的底层上。
- 避免在传感器和控制器引脚之间使用连接器,因为连接器会增加Cp并降低抗噪能力。
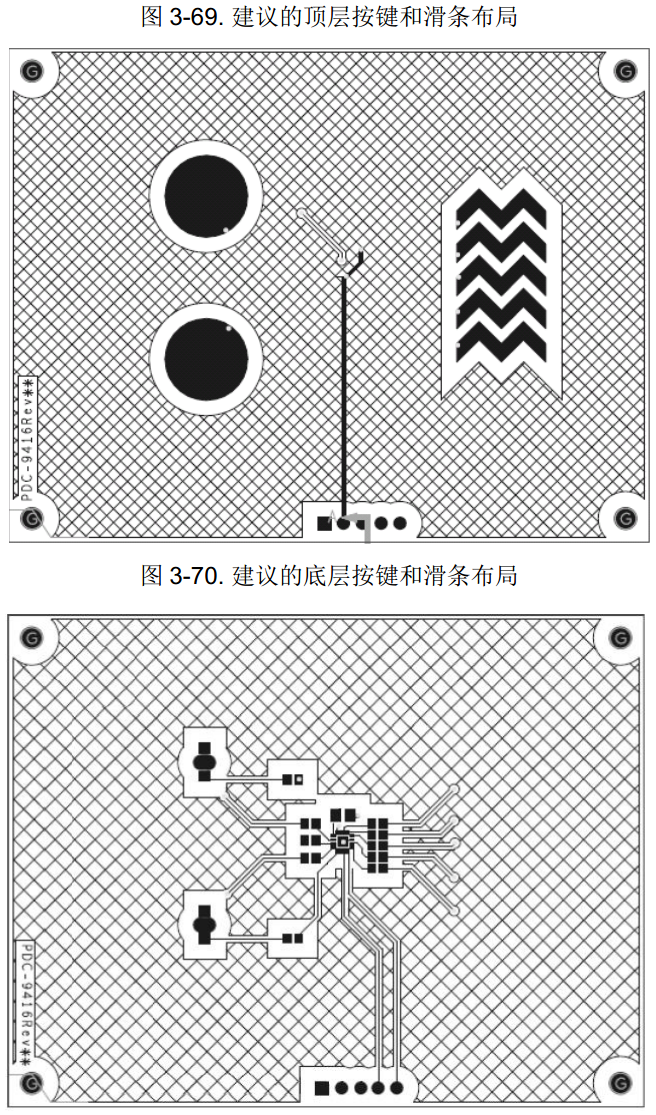
接地层:
在传感器的顶层和底层都应该进行接地层填充。铺地在CapSense传感器导电片附近时,在维持高水平的CapSense信号和增加系统抗噪能力之间需要进行权衡。网格接地规则是:
- 25%在顶层 (7mil线路,45mil间距)
- 17%在底层(7mil线路,70mil间距)
如下图示:
走线长度和宽度
- 标准PCB的最大走线长度为12英寸(即300mm),柔性电路的长度应该为2英寸。
- 走线宽度不能大于7mil(0.18mm),CapSense走线必须围绕着网格接地,且走线与接地的间隙介于10mil到20mil(0.25mm到0.51mm)之间。
Sigma Delta转换器
Sigma Delta转换器将输入电流转换为一个相应的数字计数值。该转换器包括一个Sigma-delta转换器、一个时钟发生器和两个源电流/灌电流数模转换器(IDAC)。
Sigma-delta调制器以打开/关闭方式来控制调制器IDAC的电流。补偿IDAC始终处于打开或关闭状态,可在单IDAC 模式或双IDAC模式下运行。
- 在单IDAC 模式下,调制IDAC由Sigma-delta调制器控制;补偿IDAC始终为OFF状态。
- 在双IDAC 模式下,调制IDAC由Sigma-delta调制器控制;补偿IDAC始终为ON状态。
Sigma-delta转换器还要求一个外部集成电容(即调制电容CMOD),CMOD的建议值为2.2 nF。调制器保持CMOD上的电压等于VREF。在下列某种模式下工作:
- IDAC源模式:在该模式中,开关电容电路将通过AMUXBUS A接收CMOD的电流,然后,IDAC为AMUXBUS A供电,以使其电压平衡。
- IDAC 灌电流模式 :在该模式中,IDAC 将通过AMUXBUS A接收CMOD的电流,然后,开关电容电路为AMUXBUS A供电,以使其电压平衡。
在这两种情况下,IDAC电流根据CMOD上微弱的电压变化在ON和OFF状态间进行切换,以保持CMOD的电压为VREF。
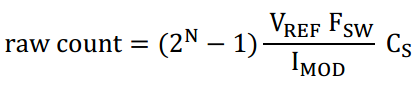



注意:原始计数值始终为正值,这是必要条件。

Sigma-delta转换器每次扫描一个传感器。模拟复用器选择一个GPIO单元,并将其连接至Sigma-delta转换器的输入端,AMUXBUS A和GPIO单元开关共同组成该模拟复用器。AMUXBUS A连接至支持CapSense功能的所有GPIO。AMUXBUS A还将集成电容CMOD连接至Sigma-delta转换器电路。AMUXBUS B用于屏蔽,并使能屏蔽时保持为VREF。
PSoC 4和PSoC 6 MCU CapSense支持用于防水和接近感应性能的屏蔽电极。CapSense具有一个屏蔽电路,该电路会使用传感器开关信号的副本来驱动屏蔽电极,这样可以避免传感器与屏蔽电极间潜在的差异。
CapSense CSX感应方式
CSX感应方法用于测量Tx电极和Rx电极间的互电容,如下图所示。Tx电极是由数字波形(Tx时钟)激发的,该波形在VDDIO(如果VDDIO不可用,则使用VDDD)和接地间进行切换。Rx电极被静态连接到AMUXBUS A。CSX方法要求使用两个外部集成电容,CINTA 和CINTB。
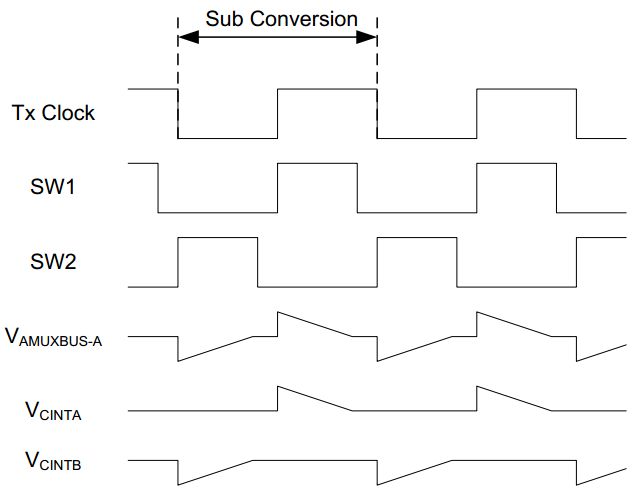
通过调制器时钟,可以测量到在一个Tx时钟周期内对外部电容进行充电/放电所需的时间。因此,调制器时钟频率必须始终大于Tx时钟频率;调制器时钟的频率越高,准确度也越高。为了正常工作,需要设置IDAC电流,使CINTA 和CINTB 电容能在一个Tx时钟周期内完成充电或放电。CapSense组件提供了一个自动校准IDAC的选项。建议使能该选项。
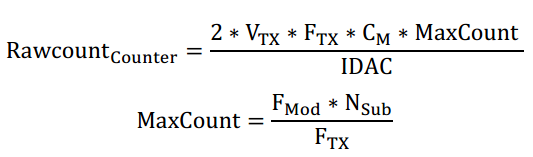
其中:
IDAC — IDAC电流
CM — Tx和Rx电极间的互电容
VTX — Tx信号幅度
FTX – Tx时钟频率
FMod – 调制器时钟频率
NSub − 子转换次数
将手指放在CSX按钮上时,Rx和Tx电极间的互电容将被减小,同时降低原始计数。从硬件获取的原始计数由CapSense组件处理,以增加触摸事件的计数(类似于CSD中的计数)。
PSoC Creator CapSesense
打开默认工程:CE220891
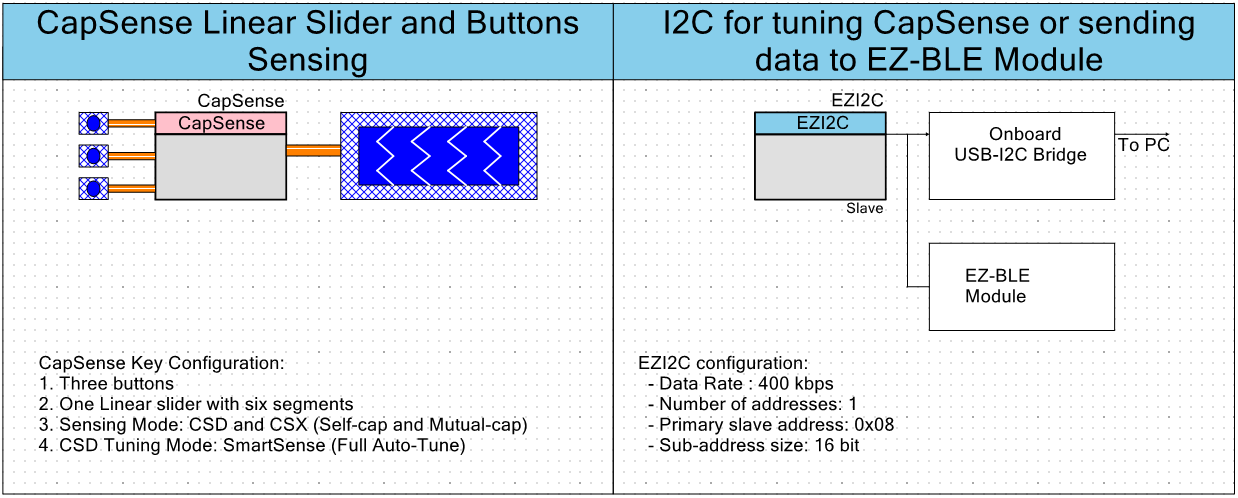
关于触摸按键、滑条的设置可以查看CapSense组件的配置,注意右侧添加的EZI2C组件,与仿真器相连,通过USB转I2C与电脑相连,其中配置的波特率为400kbps,只有一个地址,Slave地址为0x08,SubAddress为16bit。
在CapSense组件右键选择Launch Tuner,可打开触摸调试的可视化界面:
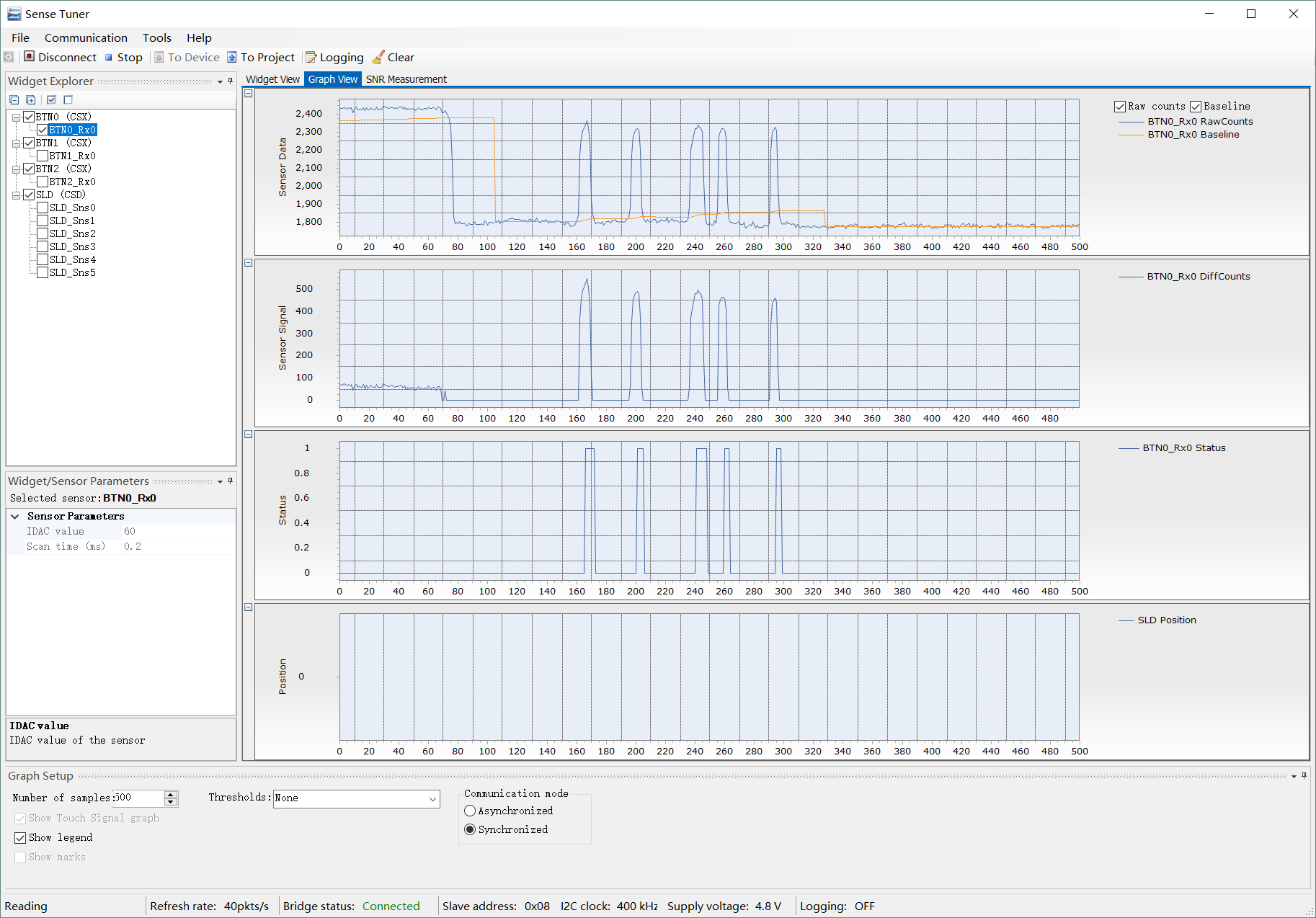
连接时按I2C Slave的参数配置填入即可,当手指按下后可以看见Raw Count和BaseLine的变化。
后续继续补充相关参数的配置说明。



